FIRST Robotics Competition [FRC] - Student
Team: 118 Robonauts
Team Profile: Team 118, The Robonauts, is a globally recognized FIRST Robotics Competition team founded in partnership with NASA Johnson Space Center. The team is known for technical excellence, innovation, and competitive success, with a strong mentorship culture that supports student growth.
Roles: Subsystem Design Lead; Competition Operations Lead (driver + alliance coordination)
CAD: Creo Parametric (Team 118 standard)
Worked alongside industry mentors to facilitate the design, integration, and assembly of robotics systems. Contributed across mechanical, electrical, and software disciplines while driving and coordinating match strategy on a fast-paced, 6-week build schedule.
Engineering Contributions
2023: ECHO (Charged Up). I contributed from concept through competition-ready hardware: rapid CAD layout, prototyping, and manufacturing using CNC and conventional machines. I built and assembled mechanisms, validated fit and motion, and supported wiring and power distribution to get systems integrated and testable.
- Chassis: 26" x 26" custom sheet metal and billet frame with SDS Mk4 swerve modules (L2 ratio) and ballast plate for low CG.
- Arm: 118:1 Falcon 500 pivot, 15.58:1 Falcon 500 telescope, carbon fiber tubes, and shimmed hex interfaces to minimize backlash.
- Intake: vector roller + dustpan with dual Falcons, cone flappers, cone-detection camera, and impact-resistant polycarbonate structure.
- Avionics integration: custom CAN star topology board and intelligent low-current power distribution for sensors and auxiliaries.

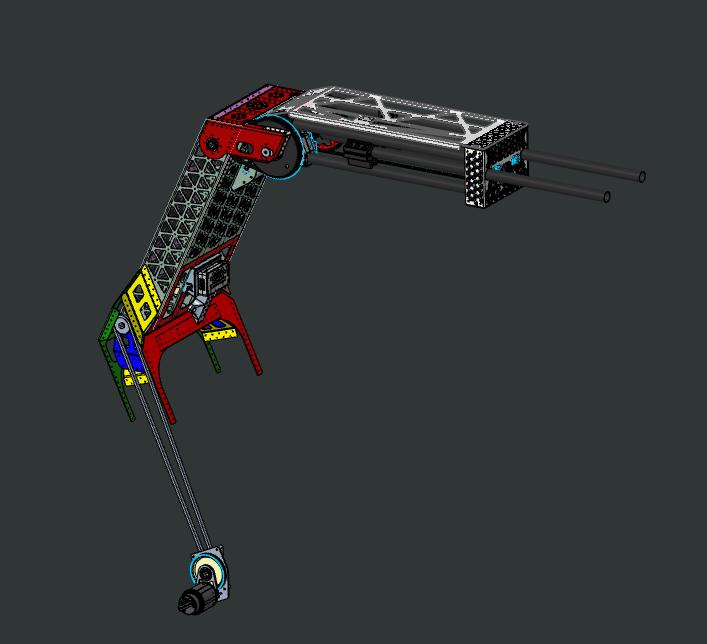
2023 arm and game-piece manipulation. I led the arm subsystem and owned both degrees of freedom in a 2-DOF mechanism (one linear, one rotary). I also integrated the arm with intake/end-effector subsystems and validated motion envelopes for cones and cubes.
- Carbon fiber telescope tubes and lightweight sheet metal construction for stiffness-to-weight.
- Falcon-driven pivot and telescope gearing to balance speed, torque, and backlash.
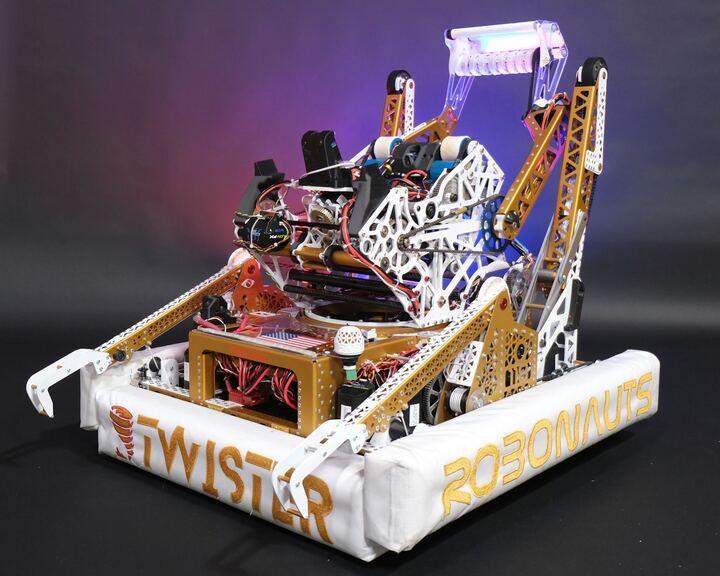
2024: TWISTER (Crescendo). I led shooter integration with the gamepiece path and coordinated interference checks with other subsystems. My primary design ownership was the shooter pitch subsystem, alongside extensive prototyping and design work on the shooter itself.
- Chassis: 27" x 27" box-tube frame with SDS Mk4 L2 swerve and integrated guards for note intake.
- Intake: dual-sided dustpan with Falcon 500s, elevator rollers, beam breaks, and quick-drop removal.
- Energy chain: 420° twist capsule routing for motors, CAN, ethernet, and sensor lines.
- Turret: Kraken X60 drive, 30.5:1 ratio, Cancoder geared for full APS coverage.
- Avionics: 18-channel CAN node, custom star topology board, protected low-voltage distribution.
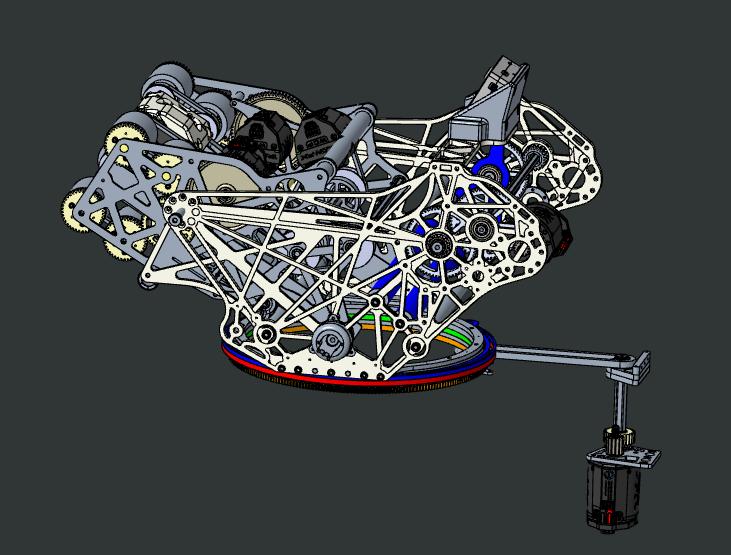
2024 shooter and pitch subsystem. I was fully responsible for the shooter pitch mechanism and did extensive prototyping plus design work on the shooter itself, focusing on alignment, feed consistency, and serviceability.
- Shooter: eight 2" wheels, independently driven Kraken X60s, servo gate, and feeder with one-way bearings.
- Shooter pitch (owned): 3/8"-12 leadscrew for low backlash and non-backdrivability.
Driver Role on Team 118
Driving for a team like 118 is defined by quick, real-time decision making and strategy coordination across multiple teams from around the world, often on short timelines. It requires deep familiarity with the robot’s response, the ability to read field flow under pressure, and tight communication with the drive coach and alliance partners.
- Pre-match: system checks, alignment calibration, and rapid fixes with the pit crew.
- In-match: rapid strategic pivots, defensive awareness, and real-time adjustments based on alliance needs.
- Post-match: tight feedback loops to diagnose issues and sync strategy for the next matchup.
Competition & Leadership
- Alliance coordination and driver operations with real-time match strategy adjustments.
- Experience delivering competition-ready mechanisms under tight build-season deadlines.
Awards & Recognition
- World Impact Finalist
- 2× First in Texas State Champion
- 2× First in Texas State Championship Impact Award
- 2× First Regional Event Winner
- 2× First in Texas District Impact Award
- 5× First in Texas District Event Winner