REV Gen II Electronics Box
Lab: Texas A&M RAD Lab
Platform: Land-based exploration rover with four independently driven wheels
CAD: SolidWorks
Key Features: Series Elastic Actuator (SEA) based suspension, fully modular drive units, off-road capable chassis
I led to the mechanical redesign of the steer-and-drive modules and development of the electrical harnessing system from the main battery to the motor controllers and central computer. This included integration of power delivery, signal routing, and connector interface design to ensure robustness during testing and field deployment.
Electronics Box
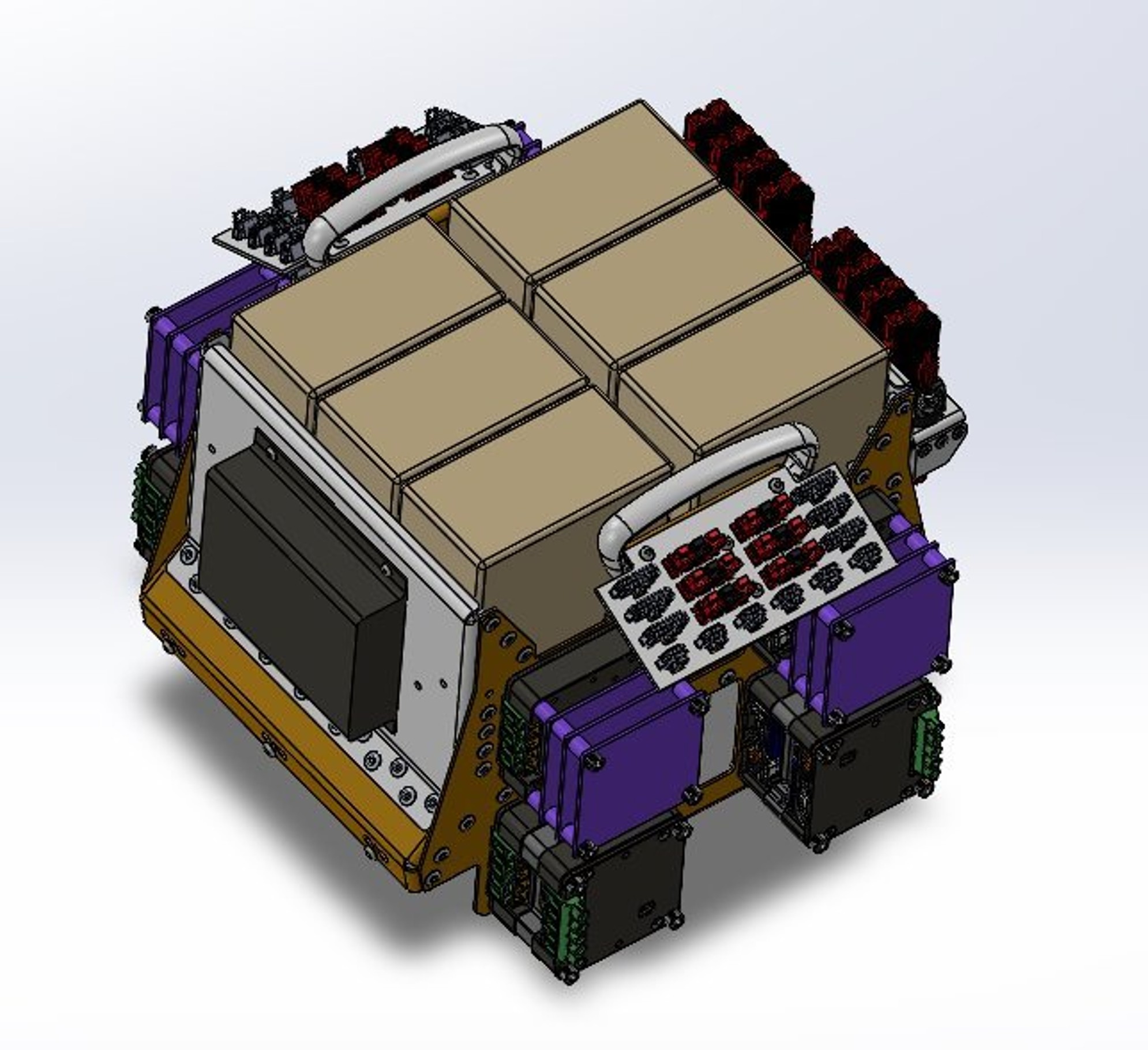
I designed a custom sheet metal electronics enclosure optimized for minimal weight and tight packaging. It houses 12 motor controllers, 6 batteries, the onboard computer, and power distribution components. Integrated mounting features and internal routing channels provide robust wire management and allow for fast service access during field testing.